robot-skin1.jpg kép nagyításához")
 robot-skin2.jpg kép nagyításához")
 robot-skin3.jpg kép nagyításához")
http://78-131-57-228.static.hdsnet.hu/14-iq-light/15591-egy-uj-mesterseges-bor-emberi-tapintast-adhat-a-robotoknak#sigProId86e959ae23
A sok különleges emberi képesség közül az egyik a tárgyak ügyes és precízen kezelése, amit a tapintásérzékünknek köszönhetünk, ami különösen az ujjaink hegyén kiélezett.
A kezünk segítségével képesek vagyunk felfedezni a tárgyak formáját és összetételét, és érezni a felületük textúráját, méghozzá anélkül, hogy rájuk pillantanánk. Azaz a tapintásunk hihetetlenül kifinomult. A robotok ebben egyelőre igen messze le vannak maradva tőlünk.
A gyártórobotok például lenyűgöző képesek tárgyakat megragadni, felvenni és mozgatni. Ehhez azonban először tudniuk kell, hogy hol van a tárgy, vagy vizuális információkra van szükségük a tájékozódáshoz. Számukra az az ideális, ha előre tudják azt is, hogy a tárgy szerkezete, felszíne mennyire erős és milyen az összetétele, mielőtt megragadnák.
Johannes Weichart, a zürichi ETH műszaki egyetem kutatója kidolgozott egy technológiát, amellyel a robotok sokkal ügyesebben tudnák kezelni a tárgyakat. E mögött egy olyan mesterséges bőr áll, amely az emberi ujjak tapintását utánozza. A kutató szerint ezzel a robotokat is fel lehet ruházni tapintási képességgel. Ráadásul a mesterséges bőr hajlékony, ami azt jelenti, hogy puha és egyenetlen formájú anyagok - például egy emberi ujjat formázó robotmanipulátor - bevonására is használható.
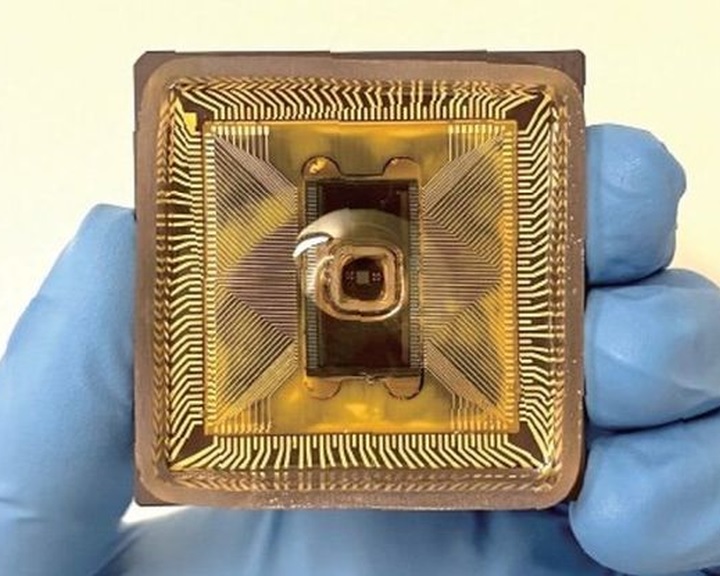
Humán megfelelőjéhez hasonlóan Weichart mesterséges bőre is receptorok széles skálájával van felszerelve. "Négyzetmilliméterenként körülbelül egy érzékelőre van szükség" - idézte a kutatót a Knowridge. Az egyes érzékelők különböző rétegekből állnak. Ezek közül az egyiket egy vezető membrán jelenti, a másikat pedig az alatta lévő elektródák, amelyeket rugók három-négy mikrométeres távolságban tartanak egymástól. A köztük lévő távolság változása pedig az elektródák által rögzített elektromos jel változását váltják ki. A vezető membránhoz egy kis gyöngy kapcsolódik. Ha nyomást gyakorolunk a gyöngyre, a membrán deformálódik - és vele együtt az érzékelő által mért jel is.
Az érzékelők fele nem egy, hanem három elektródával van felszerelve. Ezek nemcsak a gyöngyre egy adott ponton kifejtett erő nagyságát, hanem az alkalmazás szögét is mérik. Ezáltal a bőr sokkal árnyaltabb tapintásérzetet kap. "Ez azt jelenti, hogy az érzékelők elég magas frekvencián történő mintavételezésével érezni lehet a felület minőségét és textúráját, és fel lehet ismerni, ha egy tárgy csúszik a bőr felületén" - magyarázza Weichart.
A kihívás most az, hogy a bőrt robusztusabbá és - ami döntő fontosságú - konkrét alkalmazásra alkalmassá kell tenni, amihez további fejlesztések szükségesek. "Ahhoz, hogy a mesterséges bőrt a mindennapokban is használni lehessen, az érzékelőknek szükségük van egy védőrétegre, amelyet mi fejlesztettünk ki. És a kimeneti jelet is radikálisan le kell egyszerűsítenünk. A sok nyers bemeneti adat túlterhelné a robotot. Emellett még az emberek sem érzékelik az egyes receptorok kimenetét. Csak az összbenyomást észleljük" - mutatott rá a kutató a megoldandó feladatokra.
Forrás: computerworld.hu / ethz.ch